平素は鉄道模型シミュレーターオンラインをご利用いただきまことにありがとうございます。
本日17時より1時間ほど、鉄道模型シミュレーターオンラインのデータベースアップグレード作業を実施します。
メンテナンス実施中は、鉄道模型シミュレーターオンラインおより関連webサイトはご利用いただくことができません。大変ご面倒をおかけいたしますが、作業完了までお待ちいただけますようお願い申し上げます。

平素は鉄道模型シミュレーターオンラインをご利用いただきまことにありがとうございます。
本日17時より1時間ほど、鉄道模型シミュレーターオンラインのデータベースアップグレード作業を実施します。
メンテナンス実施中は、鉄道模型シミュレーターオンラインおより関連webサイトはご利用いただくことができません。大変ご面倒をおかけいたしますが、作業完了までお待ちいただけますようお願い申し上げます。
βテストにご参加いただきまことにありがとうございます。
ビルド60にて追加したゲームパッド関数のサンプルです。
ゲームパッドは、最大4台をPCに接続、スクリプトから認識することができます。
IsGamepadConnected()関数は、ゲームパッドが接続されているか確認します。
デバイス番号を0から3のいずれか1つで指定、当該デバイスが接続されていればTrueを返します。
GetGamepad系関数は、ボタンが押されていた場合、Trueを返します。この関数もデバイス番号を指定します。
AnalogStick関数は、16ビットの符号付き整数で傾き具合を返します。
サンプルは、編成スクリプトのframeイベントでゲームパッドの状態を表示するウィンドウを開いています。
このビルドからSYSTEM()関数を追加しました。この関数はLAYOUT().SYSTEM()と同じ動作です。記述を短縮できます。
#OBJID=6
import vrmapi
def vrmevent_6(obj,ev,param):
if ev == 'init':
obj.SetEventFrame()
elif ev == 'broadcast':
dummy = 1
elif ev == 'timer':
dummy = 1
elif ev == 'time':
dummy = 1
elif ev == 'after':
dummy = 1
elif ev == 'frame':
vrmapi.ImGui().Begin("w1","Sample")
vrmapi.ImGui().Text( "pad0-> " + str(vrmapi.SYSTEM().IsGamepadConnected(0)) )
vrmapi.ImGui().Text( "pad1-> " + str(vrmapi.SYSTEM().IsGamepadConnected(1)) )
vrmapi.ImGui().Text( "[0]-A " + str(vrmapi.SYSTEM().GetGamepadA(0)) )
vrmapi.ImGui().Text( "[0]-B " + str(vrmapi.SYSTEM().GetGamepadB(0)) )
vrmapi.ImGui().Text( "[0]-X " + str(vrmapi.SYSTEM().GetGamepadX(0)) )
vrmapi.ImGui().Text( "[0]-Y " + str(vrmapi.SYSTEM().GetGamepadY(0)) )
vrmapi.ImGui().Text( "[0]-Analog L " + str(vrmapi.SYSTEM().GetGamepadAnalogStickLY(0)) )
vrmapi.ImGui().Text( "[0]-Analog R " + str(vrmapi.SYSTEM().GetGamepadAnalogStickRY(0)) )
vrmapi.ImGui().End()
elif ev == 'couple':
#以下省略ビルド60にて、ゲームパッドに対応しました。Windows標準のゲームパッドがご利用いただけます。
| 上下 | 速度調整、ノッチ変更 |
| A | 警笛 |
| B | 進行方向 |
| X | オフセット操作リセット |
| Y | 制御装置切り替え |
| LB/RB | 外部カメラ:左右移動 運転台カメラ:回転 |
ビュワーのカメラ視点は、「運転台モード」と「外部カメラ」があります。運転台モードは、運転席からの視点に対応しています。運転席からのカメラオフセット操作は、回転操作がメインになります。
Pythonでは、ゲームパッドの状態値を取得できます。ゲームパッドのボタンごとにマスクをかけて、スクリプトでボタンを専有することもできます。(専有した場合、通常の操作が無効化されます。)
最大4台までのパッドをスクリプトで使うことができます。
新横浜駅「キュービックプラザ新横浜」のGWイベントに新幹線シミュレーターが登場します。詳しくは、 下記、キュービックプラザ新横浜のイベント情報をご参照ください。
βテストにご参加いただきまことにありがとうございます。
スプライトに幾何学演算機能を追加しました。
スプライトを設定する場合、表示座標を直接指定する場合は、SetPos()を利用して下記の流れで指定します。
座標値は、Pythonで演算した結果を設定します。
SetUV() -> SetPos() -> SetSprite()
スプライトシステムに基本的な幾何学演算を依頼することもできます。
SetUV() -> SetZoom() -> SetRotate() -> SetTranslate() -> SetSprite()
この流れで拡大縮小、回転、移動を計算します。UVまたはOrg関数で指定した大きさの四角形を拡大縮小、回転、移動の順に計算します。
SetZoom()などは、演算パラメータの設定を行います。(関数の呼び出し時点で演算は実行しません。)
幾何学演算は、SetPos()とは排他的です。幾何学演算または直接指定のいずれか1つが使用されます。
SetColor()は、RGBAのそれぞれの強さを指定します。スプライトのテクスチャーに乗算します。
サンプルでは、RBを0にして、Gのみ表示しています。
シェーダーの合成演算によって結果が異なります。半透明にする場合は、RGBAのすべての要素を減らしてください。
#OBJID=6
import vrmapi
global tr_sprite
tr_rot = [0.0]
tr_win = [1]
def vrmevent_6(obj,ev,param):
global tr_sprite
global tr_rot
global tr_win
if ev == 'init':
tr_sprite = vrmapi.LAYOUT().CreateSprite()
tr_sprite.LoadTrainTexture(obj.GetID(), 1)
obj.SetEventFrame()
elif ev == 'broadcast':
dummy = 1
elif ev == 'timer':
dummy = 1
elif ev == 'time':
dummy = 1
elif ev == 'after':
dummy = 1
elif ev == 'frame':
vrmapi.ImGui().Begin("w1","Sample", tr_win, vrmapi.ImGuiWindowFlags.MenuBar)
vrmapi.ImGui().SliderFloat("sl1", "ROTATE", tr_rot, 0.0, 360.0)
tr_sprite.SetUV(0,0,84,72)
tr_sprite.SetPos(0,100,84*2,100,0,100+72*2,84*2,100+72*2)
tr_sprite.SetSprite()
tr_sprite.SetUV(0,78,128,78+44)
tr_sprite.SetZoom(2.0,2.0)
tr_sprite.SetRotate(0,0,tr_rot[0])
tr_sprite.SetTranslate(450,300)
tr_sprite.SetColor(0.0,1.0,0.0,1.0)
tr_sprite.SetSprite()
vrmapi.ImGui().End()
# 以下省略 βテストにご参加いただきまことにありがとうございます。
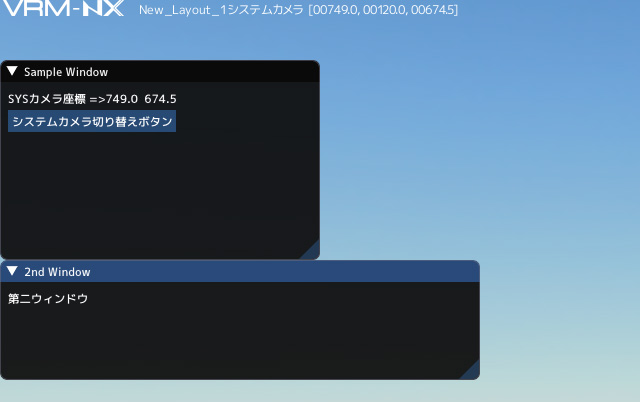
ビルド57にて、ImGuiのBegin()関数のフルバージョンをご用意しました。
ウィンドウのOpen状態を記録する変数とフラグが設定できます。
フラグはvrmapi.ImGuiWindowFlagsで指定します。
vrmapi.ImGuiWindowFlags.NoTitleBarでタイトルバーが非表示になります。
フラグはor演算で複数指定できます。
#LAYOUT
import vrmapi
po1 = [0];
po2 = [0];
def vrmevent(obj,ev,param):
if ev == 'init':
obj.SetEventFrame()
elif ev == 'broadcast':
dummy = 1
elif ev == 'timer':
dummy = 1
elif ev == 'time':
dummy = 1
elif ev == 'after':
dummy = 1
elif ev == 'frame':
global po1;
global po2;
vrmapi.ImGui().SetNextWindowPos(0,60)
vrmapi.ImGui().SetNextWindowSize(320,200)
vrmapi.ImGui().SetNextWindowSizeConstraints(320,200,480,240)
#タイトルバーなし
vrmapi.ImGui().Begin("win10","Sample Window", po1, vrmapi.ImGuiWindowFlags.NoTitleBar)
cpos = obj.SYSTEM().GetGlobalCameraPos()
vrmapi.ImGui().Text("SYSカメラ座標 =>"+str(cpos[0])+" "+str(cpos[2]))
vrmapi.ImGui().End()
vrmapi.ImGui().SetNextWindowPos(0,260)
vrmapi.ImGui().SetNextWindowSize(480,120)
vrmapi.ImGui().SetNextWindowSizeConstraints(480,120,480,120)
#移動、リサイズ禁止
vrmapi.ImGui().Begin("win11","2nd Window", po2, vrmapi.ImGuiWindowFlags.NoMove | vrmapi.ImGuiWindowFlags.NoResize)
vrmapi.ImGui().Text("第二ウィンドウ")
vrmapi.ImGui().End()
elif ev == 'keydown':
dummy = 1VRMCLOUDのAndroid対応アプリについて、Google Playのポリシーにより次回更新からAndroid 8.0以上対応に変更となります。
現在、Android8対応版の開発テストを行っています。ハードウェアチェックなどが完了次第、公開する予定です。
βテストにご参加いただきまことにありがとうございます。
編成部品でスプライトを使用するサンプルスクリプトです。
485系クハの車両テクスチャーから、ヘッドマークと方向幕をスプライトで表示しています。
(車両テクスチャーは、部品の組み込みテクスチャーを保存して、編成リソースに登録してください。)
実装については、下記コードのコメントをご参照ください。
ヘッドマーク
(0,0)から84*72 pixel
方向幕
(0,78)から128*44 pixel
#OBJID=6
import vrmapi
#global変数でスプライトオブジェクトを格納する変数を宣言
global tr_sprite
def vrmevent_6(obj,ev,param):
#global変数を使うことを指定
global tr_sprite
if ev == 'init':
# initイベントでスプライトオブジェクトを生成
# スプライトオブジェクトの生成は、LAYOUTの関数
tr_sprite = vrmapi.LAYOUT().CreateSprite()
# 編成のリソースからテクスチャーを読み込む
# サンプルのテクスチャーは、リソース番号1
tr_sprite.LoadTrainTexture(obj.GetID(), 1)
# フレームイベントを設定
obj.SetEventFrame()
elif ev == 'broadcast':
dummy = 1
elif ev == 'timer':
dummy = 1
elif ev == 'time':
dummy = 1
elif ev == 'after':
dummy = 1
elif ev == 'frame':
# スプライトは毎フレーム、設定する
# UV, POSを指定して、SetSpriteで登録
# 1枚めのスプライトを設定(ヘッドマーク)
tr_sprite.SetUV(0,0,84,72)
tr_sprite.SetPos(0,100,84*2,100,0,100+72*2,84*2,100+72*2)
tr_sprite.SetSprite()
# 2枚めのスプライトを設定(方向幕)
tr_sprite.SetUV(0,78,128,78+44)
tr_sprite.SetPos(0,300,128,300,0,300+44,128,300+44)
tr_sprite.SetSprite()
elif ev == 'couple':
dummy = 1
# 以下省略βテストにご参加いただきまことにありがとうございます。
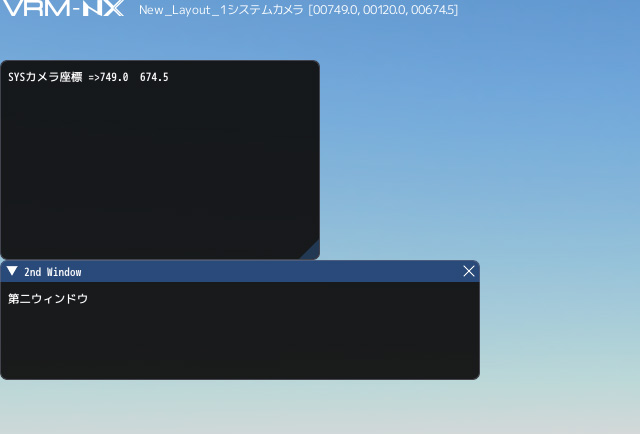
GUIウィンドウを2枚表示するスクリプトサンプルです。
imguiは、Begin()-End()で一枚のウィンドウを表示します。
複数のウィンドウを表示する場合は、Begin-Endを必要な個数並べます。
ウィンドウの表示位置は、SetNextWindowPos()で指定します。
Begin()より前に指定してください。
ウィンドウの大きさは、標準のBegin()で表示されるウィンドウが、表示サイズを自動で記憶するため、SetNextWindowSizeConstraints()で条件を縛ってください。
SetNextWindowSize()でサイズを指定、SetNextWindowSizeConstraints()でリサイズ可能な範囲を指定します。
標準以外のBegin()については、今後の拡張をお待ち下さい。
#LAYOUT
import vrmapi
def vrmevent(obj,ev,param):
if ev == 'init':
obj.SetEventFrame()
elif ev == 'broadcast':
dummy = 1
elif ev == 'timer':
dummy = 1
elif ev == 'time':
dummy = 1
elif ev == 'after':
dummy = 1
elif ev == 'frame':
vrmapi.ImGui().SetNextWindowPos(0,60)
vrmapi.ImGui().SetNextWindowSize(320,200)
vrmapi.ImGui().SetNextWindowSizeConstraints(320,200,480,240)
vrmapi.ImGui().Begin("win10","Sample Window")
cpos = obj.SYSTEM().GetGlobalCameraPos()
vrmapi.ImGui().Text("SYSカメラ座標 =>"+str(cpos[0])+" "+str(cpos[2]))
if vrmapi.ImGui().Button("b1", "システムカメラ切り替えボタン"):
if obj.IsViewGlobal():
obj.SetViewGlobal(False)
else:
obj.SetViewGlobal(True)
vrmapi.ImGui().End()
vrmapi.ImGui().SetNextWindowPos(0,260)
vrmapi.ImGui().SetNextWindowSize(480,120)
vrmapi.ImGui().SetNextWindowSizeConstraints(480,120,480,120)
vrmapi.ImGui().Begin("win11","2nd Window")
vrmapi.ImGui().Text("第二ウィンドウ")
vrmapi.ImGui().End()
elif ev == 'keydown':
dummy = 1
βテストにご参加いただきまことにありがとうございます。
ビルド55を公開しました。
GetPosition()などのスクリプト関数の仕様を変更しました。仕様を変更した関数について、βテストご案内ページに一覧を掲載しています。
仕様変更にあわせて、スクリプトの書き換えをお願いします。
各関数の詳細は、スクリプトマニュアルをご参照ください。
GetPosition()は、データを関数の戻り値で返します。データは、list型です。
このバージョンでは、カメラモードについての関数を追加しています。SetViewGlobal()で、システムカメラの切り替えができます。
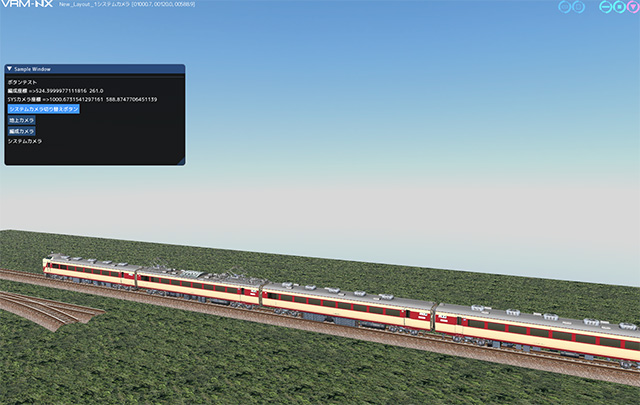
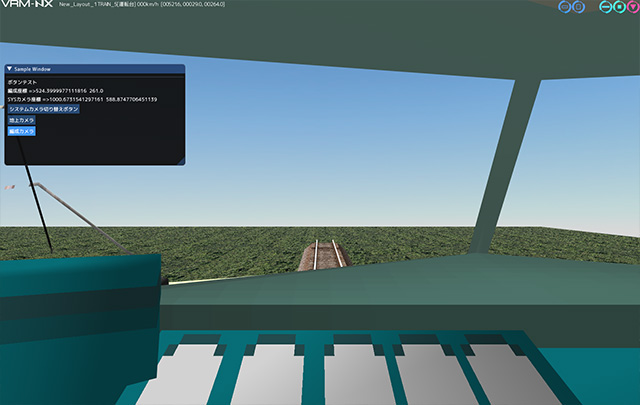
下記サンプルは、編成がID=5、地上カメラがID=8で設置したレイアウトのスクリプトです。
ボタンで、システムカメラの切り替え、表示対象を編成、地上カメラと切り替えることができます。
#LAYOUT
import vrmapi
def vrmevent(obj,ev,param):
if ev == 'init':
obj.SetEventFrame()
elif ev == 'broadcast':
dummy = 1
elif ev == 'timer':
dummy = 1
elif ev == 'time':
dummy = 1
elif ev == 'after':
dummy = 1
elif ev == 'frame':
vrmapi.ImGui().Begin("win1","Sample Window")
vrmapi.ImGui().Separator()
vrmapi.ImGui().Text("ボタンテスト")
train = obj.GetTrain(5)
tpos = train.GetPosition()
vrmapi.ImGui().Text("編成座標 =>"+str(tpos[0])+" "+str(tpos[2]))
cpos = obj.SYSTEM().GetGlobalCameraPos()
vrmapi.ImGui().Text("SYSカメラ座標 =>"+str(cpos[0])+" "+str(cpos[2]))
if vrmapi.ImGui().Button("b1", "システムカメラ切り替えボタン"):
if obj.IsViewGlobal():
obj.SetViewGlobal(False)
else:
obj.SetViewGlobal(True)
if vrmapi.ImGui().Button("b3", "地上カメラ"):
obj.SetView(8)
if vrmapi.ImGui().Button("b4", "編成カメラ"):
obj.SetView(5)
if obj.IsViewGlobal():
vrmapi.ImGui().Text("システムカメラ")
vrmapi.ImGui().End()
elif ev == 'keydown':
dummy = 1