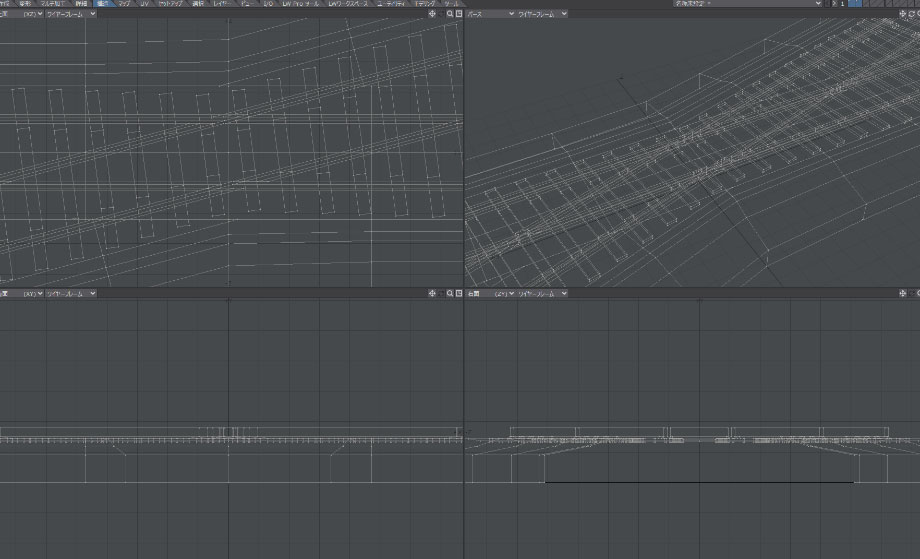
現在、特殊なポイントの開発をすすめています。
まずは、ベースとなるクロッシングレールを開発中です。写真は、在来線車両に最適な7mmレールのクロッシングレールです。
ガードレールなど未実装ですが、おおよその形はできています。
クロッシングレールをベースにダブルスリップポイントの制作に着手する予定です。

現在、特殊なポイントの開発をすすめています。
まずは、ベースとなるクロッシングレールを開発中です。写真は、在来線車両に最適な7mmレールのクロッシングレールです。
ガードレールなど未実装ですが、おおよその形はできています。
クロッシングレールをベースにダブルスリップポイントの制作に着手する予定です。
対向式ホームセット(桁式)などを収録したトミックスセット7の先行販売をDirectShopにて開始しました。
https://www.imagic.co.jp/directshop
VRM5の期間限定セールも実施しています。ご利用お待ちしております。
DMM GAMESにてHDNX01の取り扱いを開始しました。あわせて期間限定のセール価格にて販売されています。
ぜひご検討ください。

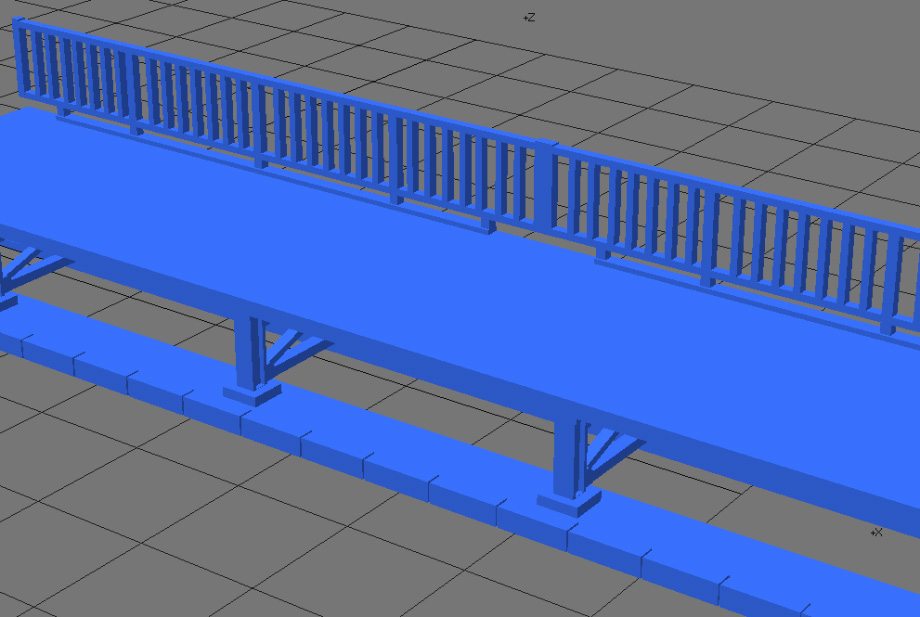
トミックスセット7のリリースに向けて準備を進めています。
対向式ホームセット(桁式)が、いよいよ登場します。キットタイプのカスタマイズを維持しつつ、容易に取り扱いできるように部品を構成しました。
お楽しみにお待ちください。
新しいトミックスセットのリリースに向けて、既存トミックス(NX ver)部品の更新を実施しました。
築堤の階段部分の造形を立体化しました。
7/10よりDMM GAMESなどで、鉄道模型シミュレーター HDNX01のお取り扱いを開始する予定です。
ぜひ、ご検討ください。
Direct Shopを運用していましたデータセンターサーバーの内部構成が変更された影響で、正常に受注できない事例が発生しました。
対応策として、本日より、Direct Shopの運用サーバーを弊社メインサーバーに変更しました。下記リンク先にページ変更となります。(ブックマークされている場合は、お手数ですが更新をお願いします。)
https://www.imagic.co.jp/directshop
サーバーの変更にあわせて、期間限定セールの日付を一週間延長しました。
旧サーバーにてお申し込みされた場合で下記の場合は、ご連絡ください。
コレクトでお申込後、2,3日経過しても発送伝票番号が記載されたメールが届かない場合は、お手数ですが、自動返信された受注メールを弊社info@までお送りください。
また、ゆうちょ振込の場合は、振込日より2,3日経過しても発送伝票番号が記載されたメールが届かない場合は、同様に自動返信されたメールを弊社info@までお送りください。(ゆうちょの記録と照合いたします。)
7月リリースは、新しいTOMIX セットを予定してます。現在、鋭意開発中です。詳細については、開発ブログにてお知らせいたします。
弊社ダイレクトショップサービスにて、HDNX01の先行リリースを開始しました。
DirectShopバージョンは、下記デザインのオリジナルパッケージになります。
今回、期間限定のリリース記念価格を設定しています。(通常価格と併売しています。ご注文時は、ご注意ください。)
ダウンロード販売サイトでの発売日は、決定次第、当ブログにてご案内します。
新しい高精細車両モデルパッケージ「HDNX01」の製品情報ページを公開しました。
ダイレクトショップ先行リリースは、6/24を予定しています。