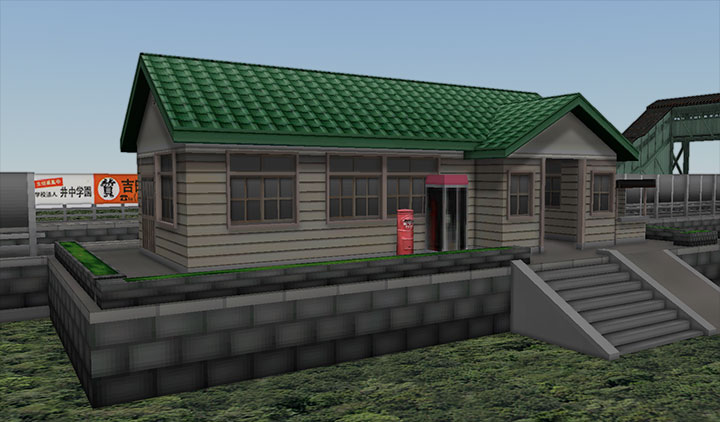
新しいトミックス木造駅舎の部品です。現行製品のグリーンタイプを部品化しています。
ポリゴン数を大幅に増加。窓枠などをポリゴンで立体的に表現しています。

新しい木造駅舎は、夜間に点灯するライトを組み込んでいます。ローカルな夜景をお楽しみください。
トミックスセット2は、1/28発売予定です。

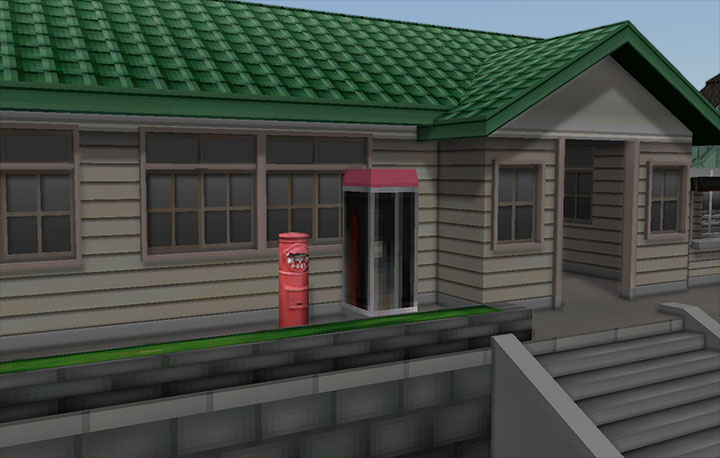
新しいトミックス木造駅舎の部品です。現行製品のグリーンタイプを部品化しています。
ポリゴン数を大幅に増加。窓枠などをポリゴンで立体的に表現しています。
新しい木造駅舎は、夜間に点灯するライトを組み込んでいます。ローカルな夜景をお楽しみください。
トミックスセット2は、1/28発売予定です。
DMM GAMES でトミックスセット1のダウンロード販売が開始されました。12/16までリリースキャンペーンを実施しています。
ぜひご検討ください。

大変お待たせいたしました。トミックスセット1の発売を開始しました。
鉄道模型シミュレーターNXは、本日よりDirectShopにてお取り扱いを開始しました。DirectShop版は、DirectShop専用ケースでのご提供になります。
ダウンロード版は、DMM GAMESにて12/7より発売を開始します。その他のダウンロード販売サイトも登録手続きが完了次第、お取り扱いを開始します。
VRMONLINE-NXは、パーツショップでお求めいただけます。
第2弾は、2022年1月にご提供できるよう開発をすすめています。ご期待ください。
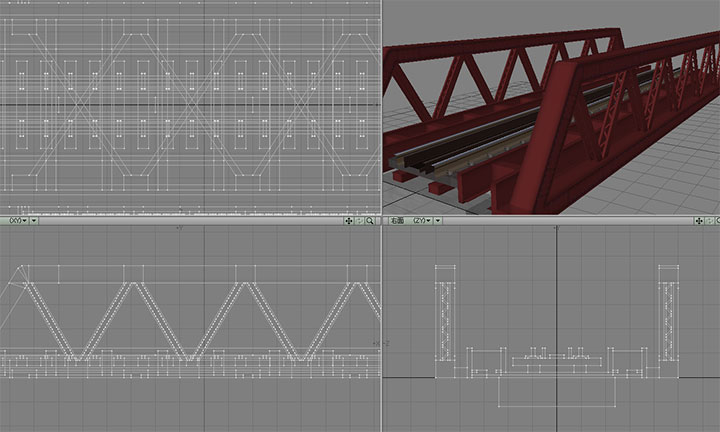
制作最終段階のポニートラス鉄橋です。先程、ポリゴンの最終チェックが終わりました。
模型製品と同様に、鉄橋桁、トラス部分が別パーツになります。組み合わせで複線化、トラムレールとの組み合わせなどをお楽しみいただけます。
トラス部分もポリゴンで細密に再現しました。
鉄道模型シミュレーターNX / VRMONLINE-NXのシステムを更新しました。
特定のCPUにて、隙間補正の計算が正しく行われないケースが確認されました。
ビルド251に、特定のCPU含まれるエラッタを回避するコードを組み込みました。配置した線路が表示されないなどの問題が解決します。
鉄道模型シミュレーターNX、VRMONLINE-NXの新しいシステムを公開しました。
起動時にアップデータダイアログが表示されましたら、更新を行ってください。
トミックスセットのリリースに向けては、SVG形式の図面ファイル出力、新旧トミックス部品のリプレース、製品AIのトミックスセット対応などを行っています。
レイアウターは、パレットの表示をGDI+に変更。これによって、レイヤーパレットをレイヤーカラーで表示可能になりました。
ビュワーは、システムカメラにヒストリー機能を実装。ポイント、信号機などのリストにあるVIEWボタンでシステムカメラをその場所に移動します。また、BACKボタンで戻ることができます。
マウスホイールでシステムカメラを前後に移動できます。
詳細は、マニュアルをご参照ください。
12/1発売予定のトミックスセット1を使った島式ホーム駅の作例です。
島式ホームセット、橋上駅舎(近代型)などを使用しています。島式ホームセットのホーム上面、側面の石積みなどは、本物の駅ホームからテクスチャーをつくりました。駅名標などは、高解像度テクスチャーで製品を再現しています。
VRMNX、VRMONLINE-NXのスターターキットなどに収録されているビルのコリジョンについて、仕様を変更しました。部品は自動更新されます。
ビルの屋上に設定されていた上部の高さを解除しました。ビルが他の部品と重なったとき、ビルに積み重なることがなくなります。
ビルを積み重ねる場合は、ビル部品の高さを数値入力してください。
鉄道模型シミュレーターNX トミックスセット1の発売日が決定しました。
12/1発売予定です。製品情報を公開しました。

本製品は、ダウンロード販売サイト、アイマジックダイレクトショップでお取り扱いします。VRMONLINE-NXは、パーツショップにてお求めいただけます。
現在開発中の第2弾、第3弾の製品情報も掲載しました。あわせてご参照ください。

新しいポリゴンモデルになったトミックス高架橋、橋脚の組み立て例です。PC橋脚は、模型製品のエッジにあるベベル、排水パイプもポリゴンで再現しました。
開発中の部品についてのお問い合わせはお受けできません。リリースに関する情報は、このブログにてご紹介させていただきます。