現在、国鉄急行電車165系の製作が進行しています。

柔軟な編成運用が魅力の165系急行電車を再現するため、各種形式を製作中です。写真は、わずか2両だけしか製造されなかったサハ164です。不足するサハシを補う目的で、車内には、売店と車販準備室が設けられています。

現在、国鉄急行電車165系の製作が進行しています。
柔軟な編成運用が魅力の165系急行電車を再現するため、各種形式を製作中です。写真は、わずか2両だけしか製造されなかったサハ164です。不足するサハシを補う目的で、車内には、売店と車販準備室が設けられています。

2005年に登場したN700系の量産先行試作車Z0編成です。現在、試験線でチェックを行っています。
Z0編成は、N700系の営業運転開始後も量産改造を受けることなく、300系J1編成の後継試験車として運用されています。各種試験用測定機器を搭載しています。また、営業車輌とは、室内レイアウトが異なります。
写真の12号車は、パンタグラフを照らすサーチライトと監視用センサーが屋上に設置されています。
VRM ONLINEに新しい貨車を登録しました。石灰石輸送車ホキ9500、穀物輸送車ホキ2000、無蓋車トキ15000のセットです。

ホキ2200です。穀物などを輸送するために製造されたホッパ車です。後期タイプをモデル化しています。所属表記を書き換えて、各地のホキ2200をお楽しみいただけます。

昭和20年代中期から30年代にかけて製造された無蓋車です。大量に製造され派生形式も多数存在します。国鉄貨物の再現にご活用ください。(オプション設定で荷物を積載できます。)



セメント会社などに所属していたホキ9500です。3タイプを用意しました。(赤色円盤が着脱可能です。)
ホキ、トキは、VRM5では第2号に収録を予定しています。
先日、ユーザー様より貨車関連の大量の資料写真をお送りいただきました。自社で可能な限り取材を行っていますが、すべてをカバーすることは不可能なため、資料写真は大変助かります。
上の写真は、開発中の車輌です。仮組が完了して本線上に配置しました。
安全性を確立する上で最も基本的なルールが閉塞(へいそく)です。ある場所から別の場所までの1区間には、1つの列車のみ許容するというルールです。前の区間に先行列車があれば、後続の列車はその区間に進むことができません。この簡単なルールで衝突を防ぎます。
自動センサーで閉塞と列車の自動停止を作ります。写真の様に3つのセンサーを使用します。
選択状態の白いセンサーが閉塞の始まりと終わりを表します。グレーのセンサーは、閉塞に列車が存在した場合の自動停止を実行します。

最初に閉塞左側のセンサーから設定します。左側のセンサーは、閉塞から列車が出て行ったときに動作します。閉塞は、共通ステータスを利用して実現します。閉塞から列車が出て行ったときに、共通ステータス1番の値を1だけ減算します。(status–は、status=status – 1と同じ意味)

次に閉塞右側のセンサーを設定します。このセンサーは、列車が閉塞に進入した場合に動作します。共通ステータスの1番の値を1だけ加算します。(status++は、status=status + 1と同じ意味)
共通ステータス1番には、0が最初に入っています。列車の進入を検出すると、status++で1になります。列車が閉塞からでていくと、status–により0になります。結果、共通ステータス1番が、0なら列車は閉塞に存在せず、1なら存在するということになります。
次に列車を停止するセンサーを設定します。共通ステータス1番の数値が閉塞の状態を表します。閉塞に列車がいるときだけ、停止の動作を行えばよいため、共通ステータスのフィルターに1番が「値が0以外」を指定します。
列車の停止は、「指定距離(mm)で停止」を選択して、停止距離を入力します。閉塞のセンサーより手前で必ず停止する様に距離を設定してください。作例では、20mmで停止しています。
以上で先行列車が閉塞にいるとき、後続列車を自動停止することができます。

列車を自動的に到着させて、待機していた別の列車を出発させる作例です。
下の列車が自動停止すると、上の列車が自動出発するようにします。
最初に停止させる列車側に自動センサーを設置します。

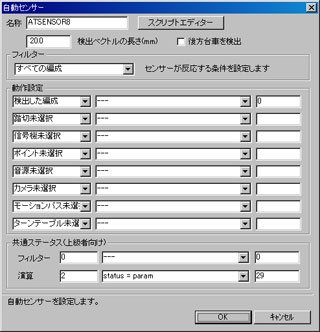
自動センサーを選択、設定ダイアログを表示したら、検出した編成に対する動作を設定します。「指定距離で停止」を選択後、パラメータに距離を入力してください。作例では200mmに設定します。
次に自動的に出発させたい列車を選択します。作例ではTRAIN10を自動出発させます。

「指定時間経過で出発」を選択して、パラメータに時間を設定します。作例では8000ミリ秒(=8秒)を設定します。
これで設定が終わりました。運転を開始すると、列車の減速開始後8秒でもう1つの列車が出発します。
自動停止と出発の基本的な構造は、このようにシンプルですが、実際のレイアウトではもう一工夫必要です。列車の自動速度調整は、速度と距離は正確に調整されますが調整にかかる時間は不定になります。作例では、8秒だと停止する前に自動的に出発してしまいます。実際にビュワーで停止するまでの時間を計測後、数秒の余裕を加算して設定すると安全です。
また、自動センサーによる自動出発の速度は最高速度の25%になるため、任意の速度に加速するための自動センサーを出発側に追加してください。
自動センサーのマニュアルについては、下記リンク先のページをご参照ください。
開発中の自動センサーで踏み切りを動作させてみました。
踏切の前後に自動センサーを配置します。作例は、画面サイズの関係で踏み切りの近くに配置していますが、実際には列車の速度などを考慮して適切に配置してください。
また、自動センサーは向きがあります。矢印が、踏切を挟み込むようにしてください。
自動センサーのダイアログで、配置した踏切を選択します。
部品を選択すると、その部品の動作を選択できるようになります。「順方向なら閉じる、逆方向は開く」を選択します。
もう1つの踏切部品も同様に選択して、動作を設定します。また、もう1つの自動センサーについても同様に設定してください。

たったこれだけの設定で、踏切を動作させることができます。従来と比較して、かなり簡単になりました。
VRM5パッケージへのアップグレード/ステップアップキャンペーンは、3/19までとなっています。ステップアップキャンペーンは、次回より第0号、第1号にかえて第2号が提供パッケージになります。第0号、第1号をご希望の方は、本日中にお申し込みいただけます様お願い申し上げます。(アップグレードは、引き続き第0号、第1号をお取り扱いします)
第2回サービスは、準備が整い次第、ご案内いたします。
自動センサーの実装が、以前より形になってきました。新しく「共通ステータス」という仕組みを用意しました。スクリプトの変数に相当する仕組みです。センサーが反応したときにステータスに対して、値をセット。その共通ステータスの値を別のセンサーが参照して、条件にあえば、センサーが動作します。ステータスは、255個まで値を記憶できます。
閉塞区間の前後にセンサーを設置して、列車が区間内に進入したときは、ステータスを1にすることで、区間の外にあるセンサーが閉塞の状態を認識することができます。閉塞を簡単につくることができます。
センサーが動作するかどうかを決定するフィルターは、列車の種別に対しても設定できます。
編成エディターに追加された種別ボックスで、0から7を選択できます。たとえば、0を特急、1を急行、2を各駅停車とみなすことで、センサーを列車の種類で反応させることができます。