HDNX01に収録の253系(3)です。
台車は、従来モデルではテクスチャーで簡易表現していたものをポリゴンで立体的に造形しています。
軸受、シリンダーなどの立体感をお楽しみいただけます。


HDNX01に収録の253系(3)です。
台車は、従来モデルではテクスチャーで簡易表現していたものをポリゴンで立体的に造形しています。
軸受、シリンダーなどの立体感をお楽しみいただけます。
HDNX01に収録の253系(2)です。
普通車、グリーン車、それぞれの座席形状、モケット、配置を再現しています。個室も再現しました。


HDNX01に収録の253系(1)です。
NEXラストランの2010年、Ne-07編成をモデルに編成全車両を新規制作しました。(キャンペーンステッカーは省略しています。)

ボディー形状は、今回の制作で再検討しています。
ボディーの折り曲げと塗り分けの微妙な差を再現しました。ドア上部の形状も立体的な表現に盛り込みました。カラーリングは、実車撮影写真から調色しています。

EF81の屋根です。
碍子はポリゴンで造形しています。95号機には、常磐無線アンテナが取り付けられていた台座や配管が残っています。今回のモデル化で再現しました。
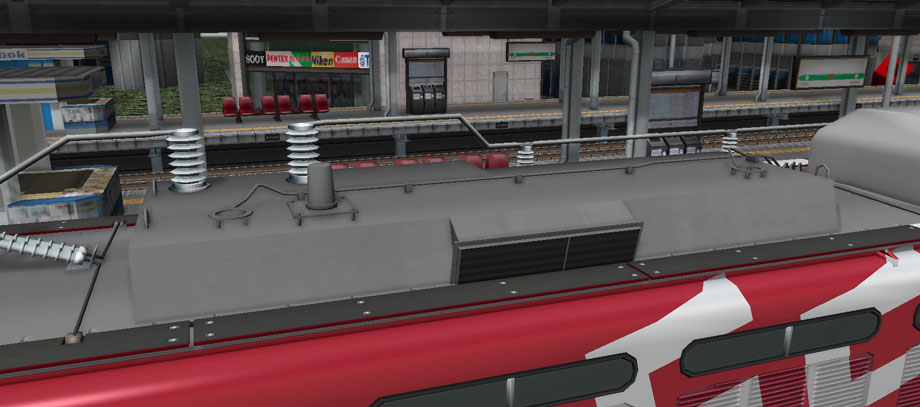
ホイッスルカバー内に収められたホイッスル、雨樋の形状、ランボードの塗り分けなど実車再現しています。
昨日は、早朝から江ノ電1001形を撮りに行ってきました。

この日は、鎌倉方向に連結されていました。

鵠沼駅で1001側先頭を。

参考資料。2013年1月撮影の旧塗装。
EF81の床下機器です。
バッテリー箱は、前期と後期で表面記載の文字が異なります。バッテリー箱の後方には、ATS車上子が配置されています。

空気タンクは、4本。その隣には圧縮空気の冷却管があります。田端所属機は、空気タンクの下部に黒磯駅通過対応の列車識別車上子が設置されています。限られたスペースに設置するため、アングル材で支柱が組まれています。

EF81 95の台車です。
台車は、ポリゴンによる立体的な造形を行っています。
軸受、シリンダー、バネなど立体的に造形しました。

バネは、多数のポリゴンを配分して、特殊なバネ構造を再現しています。
通常、バネは複雑な形状のため、ポリゴン数を節約するところですが、台車の重量感を表現するためあえて配分数を多めに取っています。

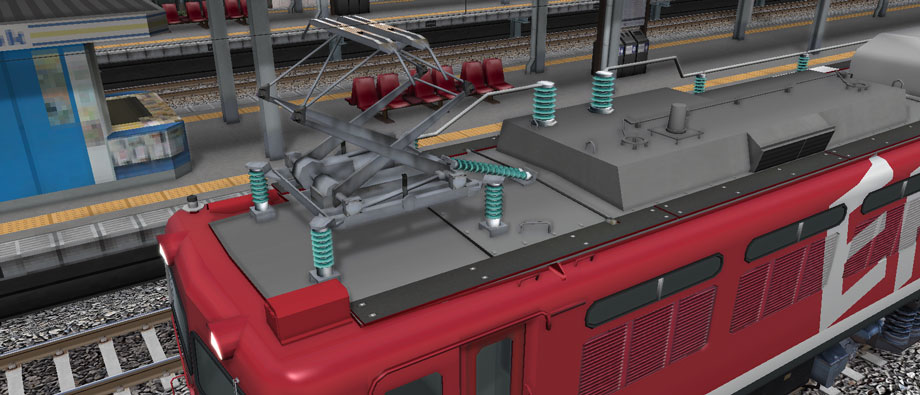
HDNX01に収録のEF81 95号機です。
新規に造形した精密モデルEF81をお楽しみいただけます。
95号機は、スーパーエクスプレスレインボーにあわせて側面に巨大なロゴが配置された塗装に変更されました。

今回、側面ロゴデザインが異なる前期と後期を制作しました。さらに、後期は「碍子が白い」2022年ごろのモデルも用意しています。


583系寝台特急形電車「ゆうづる」のグリーン車です。
昼間運行のグリーン需要を満たすために設定された座席グリーン車です。
車内には、グリーン席が整然と並んでいます。(図面では自在腰掛。ノスタルジックな感じがあります。)

グリーン車屋根には、乗務員の確認用ラジオアンテナをオプションで設置できます。

583系寝台特急形電車「ゆうづる」のスカート周りです。
スカート形状、ジャンパ栓は、実写写真を参考に精密なポリゴンを造形しました。ジャンパ栓にそれぞれ書き込まれている文字も再現しています。

スカート裏の配管は、取り付け金具の形状を実車写真をもとに再現しました。
