
鉄道模型シミュレーター5第3号、本日、発売開始です。
E3系新幹線こまち、山岳路線の急行電車165系/169系、道路、東京駅赤煉瓦駅舎、碓氷峠の橋、変電所遺構などを収録しています。この第3号を導入していただくことでレイアウトの表現力が格段に広がります。
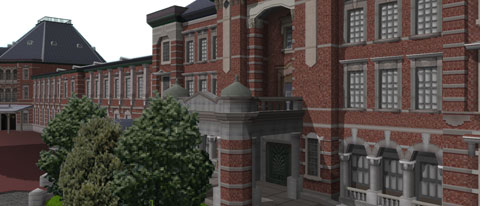
東京駅赤煉瓦駅舎は、政府の威信をかけた中央停車場計画の駅舎として建設されました。1914年12月20日より営業を開始。建設当初、3階建ての建物は第2次大戦の空襲で3階部分とドームを焼失しています。戦後、2階建てで修復されました。
現在、創建時の3階建てに戻す復元工事が進行しています。
第3号には、戦後、国鉄の発展と終焉を見守った2階建ての赤煉瓦駅舎を収録しています。2階建て時代晩年のスタイルです。

東京駅赤煉瓦駅舎の他、碓氷峠のめがね橋、新碓氷川橋梁、丸山変電所跡など収録しています。情景を格段にリアルにする道路関連パーツも多数収録しています。
収録パーツの詳細については、VRM5の製品情報ページをご覧ください。



