安全性を確立する上で最も基本的なルールが閉塞(へいそく)です。ある場所から別の場所までの1区間には、1つの列車のみ許容するというルールです。前の区間に先行列車があれば、後続の列車はその区間に進むことができません。この簡単なルールで衝突を防ぎます。
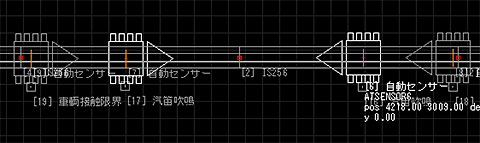
自動センサーで閉塞と列車の自動停止を作ります。写真の様に3つのセンサーを使用します。
選択状態の白いセンサーが閉塞の始まりと終わりを表します。グレーのセンサーは、閉塞に列車が存在した場合の自動停止を実行します。

最初に閉塞左側のセンサーから設定します。左側のセンサーは、閉塞から列車が出て行ったときに動作します。閉塞は、共通ステータスを利用して実現します。閉塞から列車が出て行ったときに、共通ステータス1番の値を1だけ減算します。(status–は、status=status – 1と同じ意味)

次に閉塞右側のセンサーを設定します。このセンサーは、列車が閉塞に進入した場合に動作します。共通ステータスの1番の値を1だけ加算します。(status++は、status=status + 1と同じ意味)
共通ステータス1番には、0が最初に入っています。列車の進入を検出すると、status++で1になります。列車が閉塞からでていくと、status–により0になります。結果、共通ステータス1番が、0なら列車は閉塞に存在せず、1なら存在するということになります。
次に列車を停止するセンサーを設定します。共通ステータス1番の数値が閉塞の状態を表します。閉塞に列車がいるときだけ、停止の動作を行えばよいため、共通ステータスのフィルターに1番が「値が0以外」を指定します。
列車の停止は、「指定距離(mm)で停止」を選択して、停止距離を入力します。閉塞のセンサーより手前で必ず停止する様に距離を設定してください。作例では、20mmで停止しています。
以上で先行列車が閉塞にいるとき、後続列車を自動停止することができます。