鉄道模型シミュレーター5/オンラインのアップデータを更新しました。バージョン5.0.6.60です。
鉄道模型シミュレーター5は、アップデータのページよりダウンロードしてください。
本日は、並行してマニュアルの更新作業を実施しています。
予定していました雪パーティクルは、実装に時間を要しているため次回のアップデータになります。
主な変更点
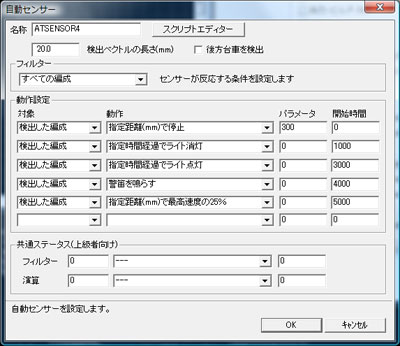
・自動センサーを大幅にパワーアップしました。命令の実行開始時刻を設定でき、一連の動作を簡単に設定できるようになりました。
・自動センサーにライト、パンタグラフの制御、閉塞の自動停止&自動出発など新しい命令が加わりました。
・共通ステータス領域を1-1023まで増やしました。
・大量のスプライトをGPUで効率よく処理するパラレルスプライトを実現しました。新しいスプライトにより、樹木、人形の設置制限が大幅に緩和されています。
・ビルボードの回転方法を変更しました。
・モーションパスで自動車を動かせるようにしました。
・信号機に初期設定を追加しました。
解説
「自動センサーの時間設定」
自動センサーが列車を検出した時刻から、何ミリ秒後に命令を実行するかを指定できるようにしました。たとえば、「停止」「ヘッドライト消灯」してから、一定時間後に「ヘッドライト点灯」「出発」という一連の動作を1つの自動センサーで設定することができます。
命令は、1つの部品に最大32個まで設定できます。複数のセンサーを組み合わせて、より複雑な動作を実現することもできます。
「閉塞制御」
自動センサーの新しい命令を使うと、前方の区間に列車がいるとき、自動的に停止、列車が退出したら出発という動作を簡単に実現することができます。前方の閉塞区間には、列車の進入で共通ステータスに1をセットする自動センサーと、区間からの退出で0をセットする自動センサーを設置します。共通ステータスをみることで閉塞区間に列車がいるか確認できるようになります。この値を監視するように指定して自動センサーの新しい命令を設定すると、列車は自動的に停止、出発を行います。
「自動車の移動」
部品を設定したラインに沿って移動するモーションパスをつかって、自動車を移動します。対象部品に移動したい自動車を選択します。あとは、モーションの時間などを設定するだけで、パスに沿って自動車が移動します。
パスを道路にあわせて配置することで道路上を走行する自動車を実現できます。バス停に停車するシーンなど工夫次第でいろいろと表現可能です。
「樹木、人形」
大量のスプライトを効率よく処理するパラレルスプライトの実装により、設置数の制限が大幅に緩和されました。テクスチャー数制限もなくなったため、今後、新しい樹木、人形をリリースしていきます。