16日午前6:00-午前8:00にデータセンターのサーバーメンテナンスが実施される予定です。
弊社webサイト、ブログ、NXシステムサーバーが、メンテナンス期間中、30分程度停止する場合があります。
メンテナンス期間を避けてご利用いただけますようお願い申し上げます。
VRMCLOUDサーバーについては、通常通り運用しております。

16日午前6:00-午前8:00にデータセンターのサーバーメンテナンスが実施される予定です。
弊社webサイト、ブログ、NXシステムサーバーが、メンテナンス期間中、30分程度停止する場合があります。
メンテナンス期間を避けてご利用いただけますようお願い申し上げます。
VRMCLOUDサーバーについては、通常通り運用しております。
NXシステムのビルド175を公開しました。近日リリース予定の7mmレール対応ターンテーブルへの対応と、新しい設置高度AIが入っています。
7mmレールに対応した国鉄のターンテーブルを近日、リリースする予定です。実物に近いスケール感と鉄道模型の利便性をあわせもった部品です。(マニュアルに新しいターンテーブルを記載しています。テクニカル>7mmレール-ターンテーブルを参照ください。)
一部の部品がダウンロードできない問題を修正しました。VRMONLINE-NXにログイン後、中断していた箇所から部品のダウンロードを再開します。
VRMONLINE-NXにて、ダブルスリップポイントなどの特殊ポイント、ガーダー鉄橋などをリリースしました。
7mmレール対応のダブルスリップポイント、正規角度+半径のポイント、クロッシングレールなど特殊レールのセットと、7mmレールガーダー鉄橋のセット、さらにフレキシブル対応でシーンへの適用が簡単になったタイガーロープセットをリリースです。

ポイントセットには、実物のポイントに近い11番、14番相当のポイント、15度+正確なカーブ半径のポイントなどリアル+利便性を向上した7mmレール部品を収録しています。
ただいま、7mmレールの鉄橋を開発中です。
ガーダー鉄橋、トラス鉄橋を制作しています。
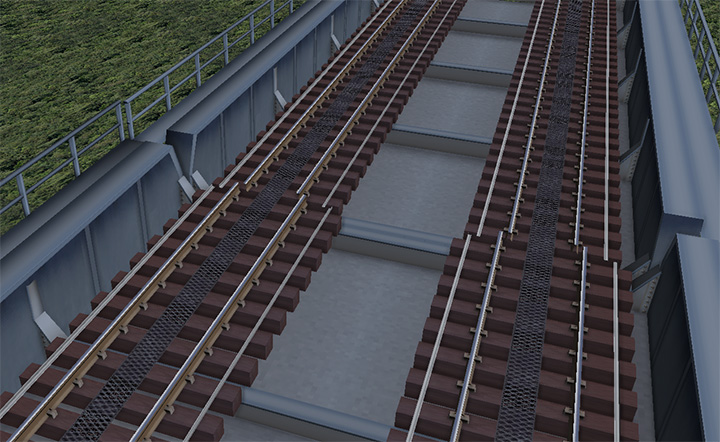
手前が9mmレール、奥が7mmレールです。
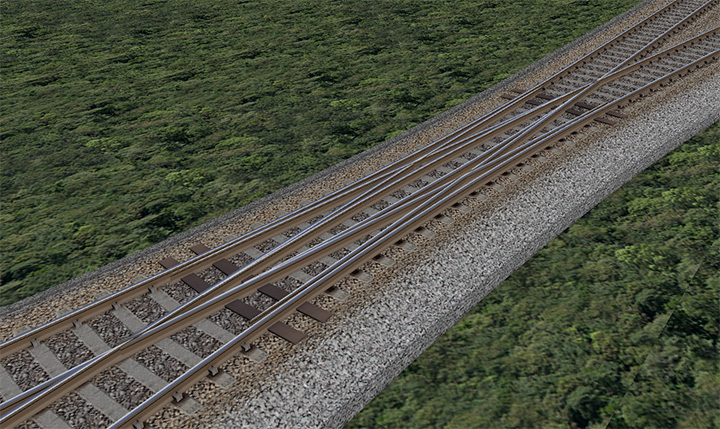
開発中の7mmレールダブルスリップポイントの試験走行を実施しています。

直進と分岐、それぞれの走行テストを行い、動作を確認しています。非常に複雑な構造のポイントですが、問題なく動作しています。
現在、よりリアルなシーンを演出できる11番相当ポイント、14番相当ポイント、構造的なレイアウト設計に最適な15度交差レールを設計中です。完成次第、リリースいたします。
VRMONLINEにて、883系など2013年に発売した部品を収録したお得なセットをリリースしました。VRMONLINEの部品拡充にご利用ください。
このセットは、VRMONLINE-NXにてアンロック製品で解除することできます。VRMONLINE-NXでもお得に導入できます。
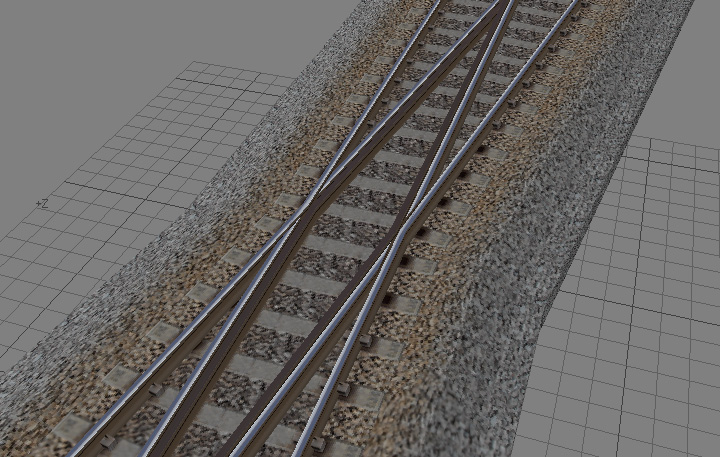
開発中の7mmクロッシングレールです。交差部分には、専用のガイドレールをモデリングしています。
交差角度は、実物の線路に相当する角度で設定しています。クロッシングレールができあがると、複雑な構造をもつダブルスリップポイントが製作可能になります。
VRMONLINE-NXにて、7mmレールのカント付きカーブレールをリリースしました。ぜひご検討ください。
現在、7mmレールのクロッシングレールなどを開発中です。近く詳細をご案内できる予定です。
7mmレールのカント付きカーブレールを開発中です。在来線のカーブシーンがよりリアルになります。
28mm複線、34mm複線に対応するカーブレールを制作しています。